Automated Proof of a Benign Nonconvex Landscape Theorem
In early 2026, I noticed that LLM agents are becoming more capable at solving math problems, and started to use them more for theorem proving. Early April, I ran an automated theorem proving experiment on a nonconvex optimization problem from sum-of-squares optimization, an extension of a chapter of my PhD work.
The goal was to give an agent the formal statement of a theorem in Lean, a computational search toolkit and a verification harness, then let it autonomously work through the whole cycle that I previously went through: search for counterexamples, infer structure, write a mathematical blueprint, formalize the proof, and keep going until Lean accepted the final theorem.
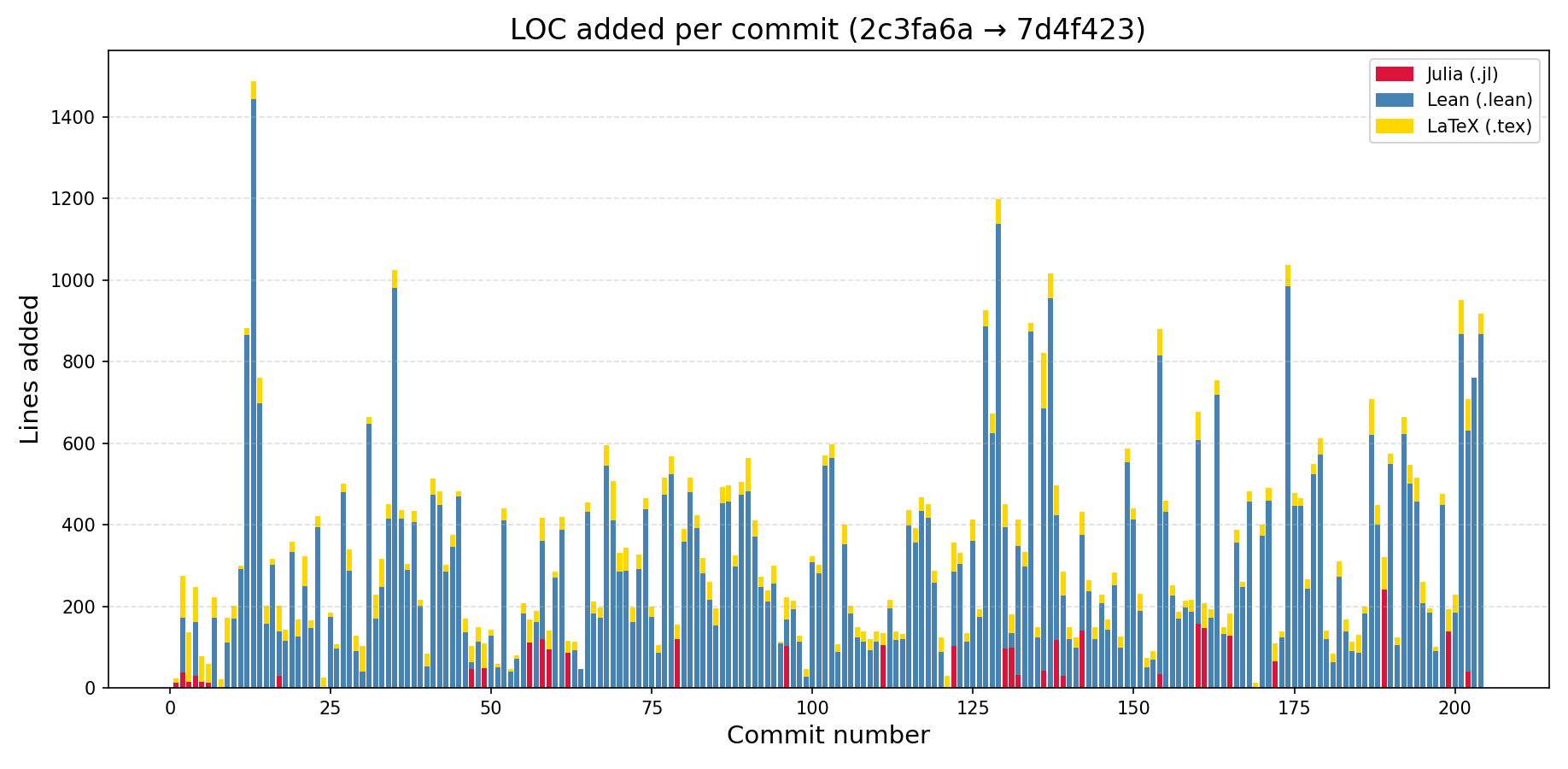
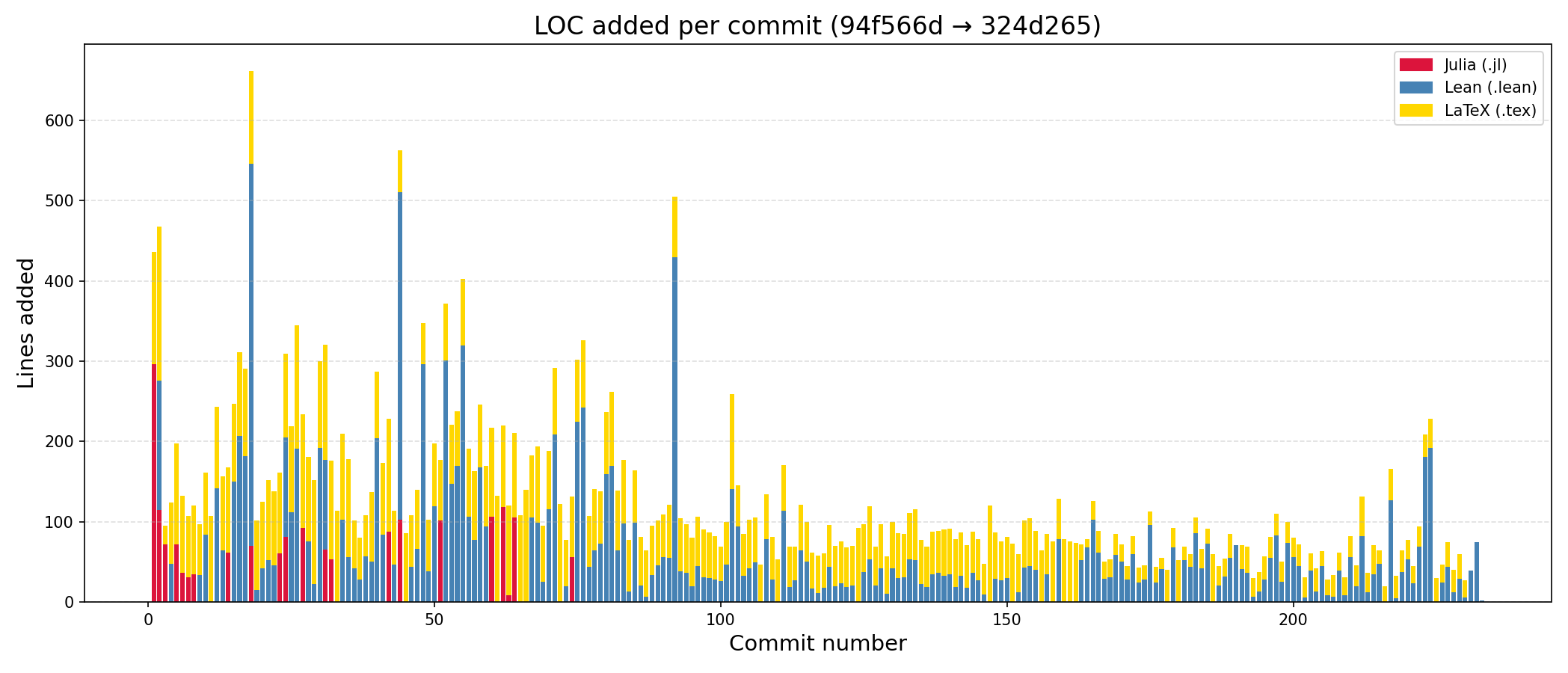
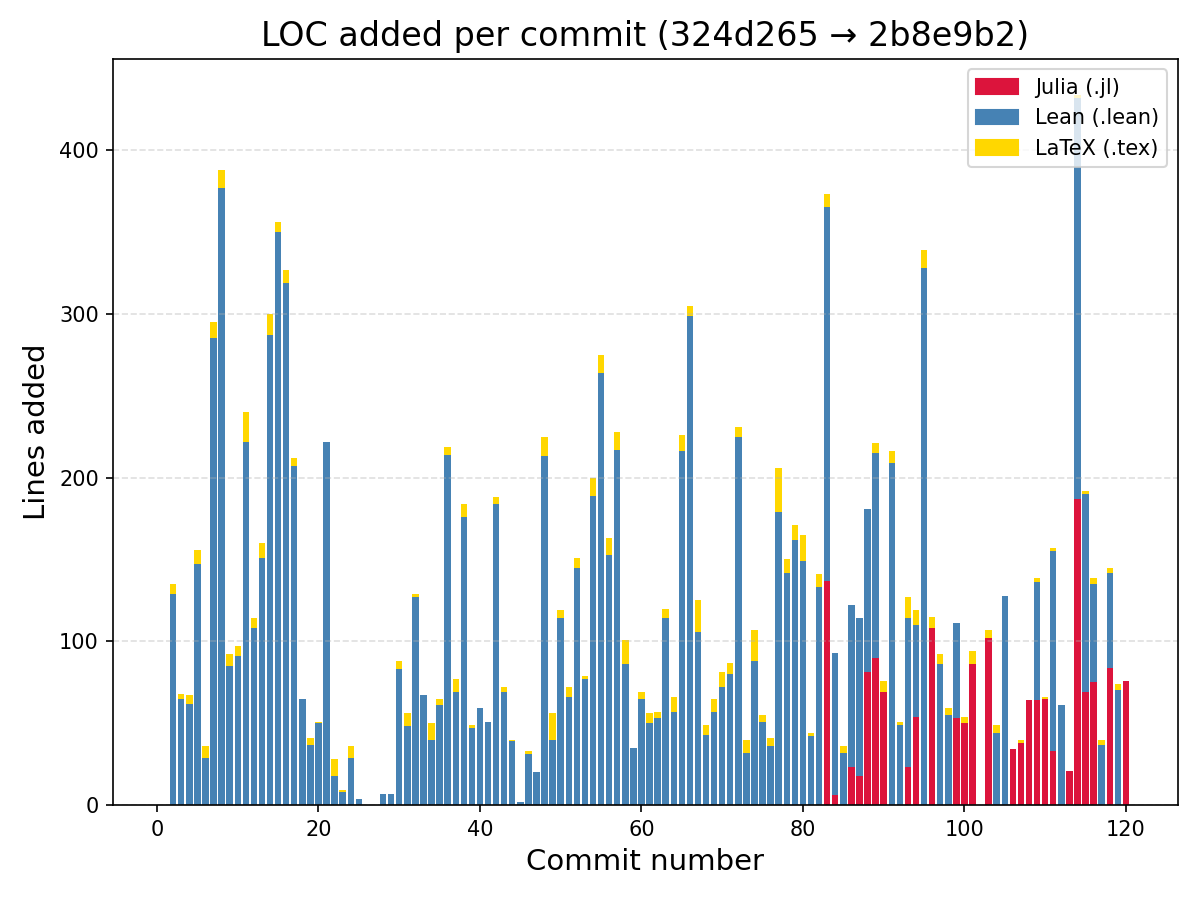
Over roughly three days of continuous work, the agent produced about 58k lines of Lean, 2k lines of Julia, 7.5k lines of LaTeX, and more than 200 commits before finally proving the theorem.
The theorem proved
Let \(\mathbb{R}[x_1,x_2,x_3]_d\) be the space of ternary forms of degree \(d\), and let
\[\mathbf{u} = [u_1,\ldots,u_4] \in \mathbb{R}[x_1,x_2,x_3]_2^4.\]For a quartic sum-of-squares form \(p \in \Sigma[x_1,x_2,x_3]_4\) consider the nonconvex objective
\[f_p(\mathbf{u}) = \left\|\sum_{i=1}^4 u_i^2 - p\right\|^2,\]where the norm comes from any positive-definite inner product on quartic ternary forms.
This objective asks for a representation of \(p\) as a sum of four squares of quadratic forms. The formulation is nonconvex because the variables are the quadratic factors \(u_i\), not the positive semidefinite Gram matrix from the typical sum-of-squares semidefinite program (SDP). The theorem says that this nonconvex landscape is benign.
Theorem For all \(p \in \Sigma[x_1,x_2,x_3]_4\), if \(\mathbf{u} \in \mathbb{R}[x_1,x_2,x_3]_2^4\) is a second-order critical point of \(f_p\) satisfying the first- and second-order necessary conditions
\[\nabla_{\mathbf{u}} f_p(\mathbf{u})(\mathbf{v}) = 0 \quad \text{and} \quad \nabla_{\mathbf{u}}^2 f_p(\mathbf{u})(\mathbf{v},\mathbf{v}) \ge 0\]for every perturbation \(\mathbf{v}\), then
\[f_p(\mathbf{u}) = 0.\]In other words, every second-order critical point is also globally optimal and there are no spurious local minima for the rank-4 ternary quartic Burer-Monteiro factorization.
Why is this theorem interesting?
It is a classically known fact that all nonnegative binary forms (univariate polynomials) can be written as a sum of two squares. In a joint paper with Benoit Legat and Pablo Parrilo published in the SIAM Journal of Optimization, we showed that for all nonnegative binary forms \(p\), the nonconvex rank-2 factorization of \(f_p(\mathbf{u}) = \left\| u_1^2 + u_2^2 - p\right\|^2\) has no spurious local minima. This is surprising because the usual method for finding sum-of-squares decompositions solves a rank-\(n\) SDP; we showed that it also suffices to solve a much smaller (albeit nonconvex) problem using first-order methods.
Naturally, we also asked the same question for multivariate polynomials, but at that time we were stumped by the complexity of the problem (the proof for binary forms does not easily generalize) and did not make much progress. A natural next class to study would be ternary quartics, as Hilbert showed that all nonnegative ternary quartics can be written as a sum of 3 squares.
Surprisingly, for a rank-\(3\) factorization, \(\mathbf{u} = [x_1^2, x_2^2, x_1 x_2]\) is a second-order critical point of \(f_p\) with \(p = 2x_3^4 + x_1^4 + x_2^4 + x_1^2 x_2^2\) (this counterexample first appeared in a paper by Blekherman, Sinn, Velasco and Zhang). Hence the rank-4 result proved in the above theorem is sharp.
Why is this theorem amenable to automated proof?
I think this theorem is a useful benchmark for automated proof development because it has the following properties:
- Its involves elementary objects (polynomials, vector spaces, inner products, first- and second-order optimality conditions) that are easy to state using Lean and mathlib
- The theorem statement can be written concisely into Lean, and verifying the translation is straightforward
- Although the statement is concise, the problem has intricate algebraic structure that has to be discovered by the proof agent
- It is easy to make incremental progress on the theorem using computational tools
It’s worth elaborating on the last point. This theorem is statement that has to be proved for all critical points \(\mathbf{u} \in \mathbb{R}[x_1,x_2,x_3]_2^4\) of all \(p \in \Sigma[x_1,x_2,x_3]_4\). If we fix a particular \(\mathbf{u}\), it turns out that the search over all \(p\) that \(\mathbf{u}\) is a spurious critical point of, can be formulated as a SDP (for more details see our paper or these slides). If \(\mathbf{u}\) does not admit such counterexamples, the dual certificate of the SDP gives a proof for this particular \(\mathbf{u}\). The challenge is to find certificates for all \(\mathbf{u}\).
It’s important to emphasize that these SDP certificates are numerical artifacts, so they are not directly proofs. But patterns from these certificates can be generalized into proofs for more general classes of \(\mathbf{u}\). In fact, we went through a similar process (manually) to prove the result for binary forms:
The agentic loop
This suggests a natural SDP-to-Lean iteration loop that can be automated by agents:
- Find and fix a \(\mathbf{u}\) not covered by current proof, use SDP solvers to search for counterexamples and extract certificate patterns
- Generalize the observed patterns into a mathematical proof blueprint for a larger class of \(\mathbf{u}\)
- Formalize the proof in Lean
- Run a verification harness that builds the Lean files and checks the theorem
- Repeat until the theorem is proved
The code and harness I used are in this github
repository, along with
the completed proof. The commit history made by the agent for the successful run
can be found in this
branch.
The successful run followed the loop encoded in
prompts/ternary_quartic.md.
The agent was instructed to begin with numerical explorations. The Julia code in
julia/
formulates SDP searches using JuMP and
SumOfSquares.jl to call SDP
solvers. The purpose of these searches was to look for spurious second-order
critical points and when searches failed, to inspect the dual certificates
explaining why.
Those certificates suggested algebraic patterns such as ideal membership,
divisibility, dimension counts, and structure in the span of quadratic forms.
The agent was required to record numerical experiments under
julia/ternary_quartic_explorations/
and translate the resulting proof ideas into
writeup/ternary_quartic/blueprint.tex.
The agent first writes each proof in ordinary mathematical language before
formalizing. The Lean files were added under the folder
TernaryQuarticProof/,
with the immutable statement in
TernaryQuartic.lean
left untouched.
The verification step involves running a script:
./scripts/verify_ternary_quartic.sh
That script builds the Lean targets, typechecks the root proof file, confirms that the required theorem is exposed under the expected name, and checks the axiom footprint. The final accepted theorem depends only on the standard mathlib axioms:
propext, Classical.choice, Quot.sound
Thus, the script rejects a proof that leaves a sorry behind or introduces
other axioms.
The harness
The proof ran inside the repository’s Vagrant VM. That VM supplies a reproducible Ubuntu environment with Lean, Julia, Lake caches, and solver dependencies available to the agent.
The launcher for the successful track is
scripts/run_ternary_quartic.sh. It starts
Codex (for this proof I used GPT 5.4 xhigh) with a persistent keepalive
prompt:
Keep the goal fixed: prove TernaryQuartic.ternaryQuartic_rankFour_no_spurious_socp for TernaryQuarticRankFourNoSpuriousSOCP, using Julia SDP dual certificates only to generate and test proof ideas, then write the full argument in writeup/ternary_quartic/blueprint.tex before formalizing it in Lean; add only proof-serving lemmas, keep the final theorem declaration in TernaryQuarticProof.lean, do not weaken or restate the target, do not touch TernaryQuartic.lean, treat the verification harnesses as stable unless explicitly asked, do not build or depend on low_rank_univariate_sos/, log all experiments and strategy changes in writeup/ternary_quartic/exploration_log.tex, record numerical claims in julia/ternary_quartic_explorations/ and reference them in the .tex files, verify regularly with ./scripts/verify_ternary_quartic.sh, commit each coherent round of progress, and do not stop until the Lean proof, blueprint, verification, and final commit are all complete.'
The important point is continuity. A proof attempt like this does not fit into a single short interaction. The agent has to survive context compaction, long-running commands, changing proof strategies, and many rounds of failed formalization. The keepalive prompt reasserts the target and the rules of the project so that each continuation resumes the same job instead of drifting into a nearby one.
The prompt also constrained the workflow. Without it, an agent can easily make progress in ways that do not actually prove the target theorem: weakening the statement, changing the verifier, accumulating unrelated abstractions, or treating numerical evidence as if it were a proof.
Reproducing the check
The repository contains the final Lean proof and the verification script. To check the ternary-quartic result, run:
./scripts/verify_ternary_quartic.sh
The Julia setup and solver workflow are documented in
docs/julia_guide.md. Lean
build instructions are in
docs/lean_guide.md,
and the VM setup is in
docs/vagrant_guide.md.
Failed runs
The successful run was not my first attempt. An earlier run got stuck on a proof strategy that turned out to be too hard to formalize.
Another failed run spent too much time running Julia experiments and did not turn the computational output into a viable proof strategy.
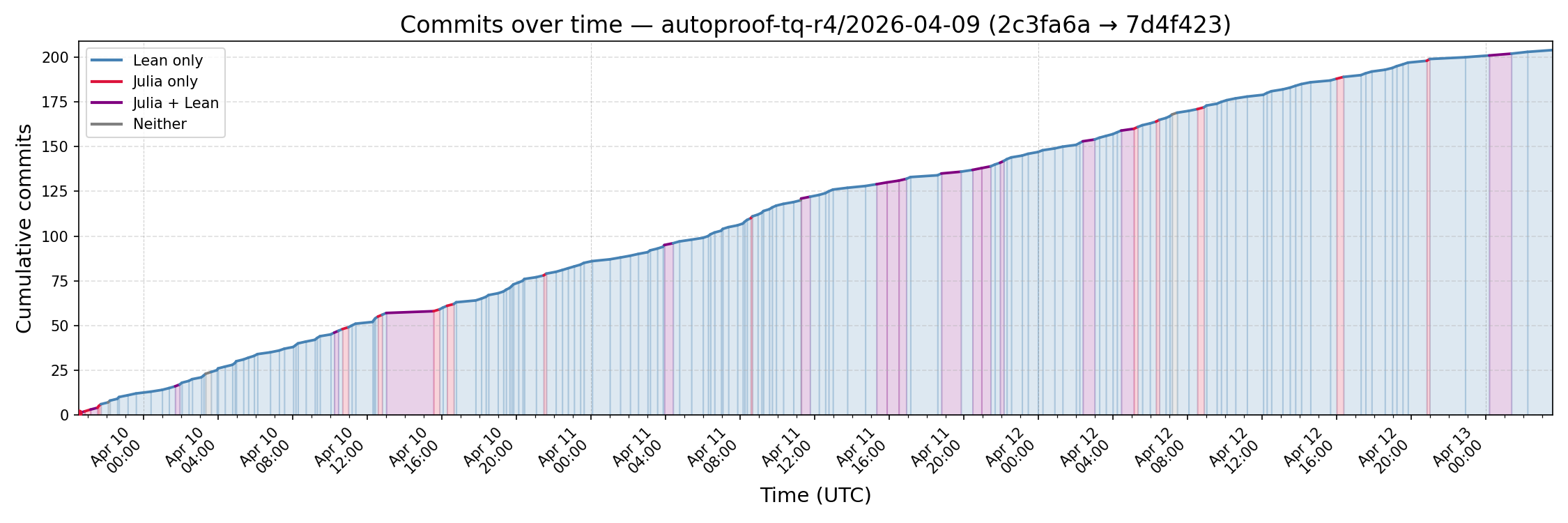
Those failures suggested that the agent needed a tighter loop. Exploration was allowed, but its progress has to be summarized in a written blueprint. Lean formalization was allowed, but only after the proof idea was clear enough to survive translation. It also seemed important to have the agent keep a log of which subgoals were proved, abandoned, or still blocking the argument.
The successful run used that more disciplined loop, and the figure below shows the progress it made over 3 days, in terms of commits over time.
Outline of the proof
I used a LLM to summarize the Lean proof into a 10-page PDF. Below is a brief overview of the proof structure.
For a rank-4 factor \(\mathbf{u}=[u_1,\ldots,u_4]\), define the linear map \(A_{\mathbf{u}}(\mathbf{v}):=\sum_{i=1}^4 u_i v_i\) and the residual \(r(\mathbf{u},p):=\sum_{i=1}^4 u_i^2-p\). First-order criticality states that
\[\langle A_{\mathbf{u}}(\mathbf{v}),r(\mathbf{u},p) \rangle =0 \quad \forall \mathbf{v},\]i.e. the residual is orthogonal to the image of \(A_{\mathbf{u}}\). Second-order criticality states that
\[\left\langle A_{\mathbf{v}}(\mathbf{v}),r(\mathbf{u},p)\right\rangle +2\Vert A_{\mathbf{u}}(\mathbf{v})\Vert^2\ge 0 \quad \forall \mathbf{v}.\]Thus, for every kernel direction \(\mathbf{w}\in\ker A_{\mathbf{u}}\), \(\left\langle A_{\mathbf{w}}(\mathbf{w}),r(\mathbf{u},p)\right\rangle\ge 0.\) If every sum-of-squares summand \(q^2\) of \(p\) can be written, modulo the image of \(A_{\mathbf{u}}\), as a sum of squares of kernel directions, the first- and second-order conditions forces \(r(\mathbf{u},p)=0\). This is a general strategy, also shared with the proof of the binary form/univariate polynomial case.
The hard part for ternary quartics is proving that this decomposition exists for every possible choice of \(\mathbf{u}\). For simplicity we work with dehomogenized polynomials intead of forms. Define \(\rho_{\mathbf{u}}(c):=\sum_{i=1}^4 c_i u_i\) for \(c\in\mathbb{R}^4\), and let
\[E(\mathbf{u}):=\{c:\rho_{\mathbf{u}}(c)\text{ has degree at most }1\}.\]Elements of \(E(\mathbf{u})\) are the linear combinations of the four quadratic factors whose quadratic terms cancel. If \(0\ne c\in\ker\rho_{\mathbf{u}}\), then for any quadratic \(q\) the direction \(\mathbf{w}=(c_1q,\ldots,c_4q)\) satisfies
\[A_{\mathbf{u}}(\mathbf{w})=q\rho_{\mathbf{u}}(c)=0,\qquad A_{\mathbf{w}}(\mathbf{w})=\left(\sum_{i=1}^4 c_i^2\right)q^2,\]so every square \(q^2\) is already a kernel square, after rescaling. Otherwise \(\rho_{\mathbf{u}}\) is injective, and rank-nullity applied to the map taking \(\rho_{\mathbf{u}}(c)\) to its homogeneous quadratic part gives \(1\le \dim E(\mathbf{u})\le 3.\) The proof then splits according to whether this dimension is \(1\), \(2\), or \(3\).
In each case, the proof uses changes of variables and rotations among the four factors to simplify the relations in \(E(\mathbf{u})\). The target is to prove that every quadratic square admits a decomposition
\[q^2=A_{\mathbf{u}}(\mathbf{v})+\sum_j A_{\mathbf{w}^{(j)}}(\mathbf{w}^{(j)}), \qquad \mathbf{w}^{(j)} \in \ker(A_{\mathbf{u}}).\]Sometimes this is immediate because every quartic monomial lies in \(\operatorname{im} A_{\mathbf{u}}\). In the remaining cases, the quotient by \(\operatorname{im} A_{\mathbf{u}}\) has only one or two missing classes, such as the constant coefficient or one linear coefficient. The proof writes down explicit kernel directions \(\mathbf{w}^{(j)}\) whose squares match those missing coefficients. Summing over an SOS representation \(p=\sum_k q_k^2\) gives the certificate above. Therefore every second-order critical point has zero residual and is globally optimal.
Discussion
Conclusion
In this post I described an agentic harness that I used to autonomously produce a novel mathematical result, where the input is a theorem statement in Lean and output is a fully formalized proof. Although the final proof is intricate and complex, incremental progress can be made at every stage by solving optimization problems and examining their dual certificates, with rapid feedback from Julia numerical programs and Lean formal verification.
This ternary quartic theorem proved here could be a step toward a more general workflow: use optimization software to generate proof certificates from examples, use LLMs to generalize these into mathematical arguments, and use Lean to check that the proofs are correct and the final theorem is exactly what was claimed.